Index
Introduction

The HC-SR04 Ultrasonic Sensor is a commonly used distance measuring sensor module. It operates by sending out ultrasonic sound waves and then measuring the time it takes for the waves to bounce back after hitting an object. Based on this time measurement, it calculates the distance between the sensor and the object.
The HC-SR04 Ultrasonic Sensor is a commonly used distance measuring sensor module. It operates by sending out ultrasonic sound waves and then measuring the time it takes for the waves to bounce back after hitting an object. Based on this time measurement, it calculates the distance between the sensor and the object.
Hardware Overview

Transmitter (TX): The transmitter in the HC-SR04 Ultrasonic Sensor emits ultrasonic sound waves. These sound waves, usually at a frequency of 40 kHz, travel through the air and bounce off any objects in their path, creating an echo that can be detected.
Receiver (RX): The receiver in the HC-SR04 Ultrasonic Sensor detects the reflected ultrasonic sound waves, or echoes. It then converts these sound waves into electrical signals and measures the time interval between the transmission and reception of the sound waves to determine the distance to the object.
Crystal Oscillator: The HC-SR04 Ultrasonic Sensor uses a crystal oscillator to maintain precise timing for the transmission and reception of ultrasonic waves. This ensures accurate distance measurements by providing a stable frequency reference for the sensor’s operations.
Working Principle
The HC-SR04 Ultrasonic Sensor operates based on the principle of emitting ultrasonic waves from a transmitter and then receiving the echo bounced back from an obstacle through a receiver. Here’s how it works:
- Trigger Pulse: The sensor is triggered, sending out a small ultrasonic pulse typically consisting of 8 cycles at a frequency of 40 kHz.
- Ultrasonic Waves: These pulses travel through the air and collide with obstacles in their path.
- Echo Reception: The sensor then waits for the echo of the ultrasonic waves. When the echo is received, it generates an output pulse.
- Time Measurement: The time taken for the ultrasonic pulse to travel to the object and back is measured using a timer.
- Distance Calculation: Based on the known speed of sound in air (typically around 343 meters per second at room temperature), the distance to the object is estimated by calculating the time taken for the round trip.
- Output: The calculated distance is usually provided as an output signal, which can be read by a microcontroller or displayed on a screen.
In conclusion, the HC-SR04 Ultrasonic Sensor successfully estimates distance by utilizing the principle of time-of-flight, measuring how long it takes for ultrasonic waves to travel to an object and back.
Features
- Transmitter (TX): Emits ultrasonic sound waves.
- Receiver (RX): Detects the reflected sound waves (echo).
- High Accuracy: Provides accurate distance measurements.
- Long Range: Can measure distances from 2 cm to 400 cm.
- Simple Interface: Easy to use with microcontrollers like Arduino.
- Low Power Consumption: Operates efficiently with minimal power.
- Compact Design: Small and lightweight, suitable for various projects.
- Affordable: Cost-effective solution for distance measurement.
Application
- Distance measurement
- Obstacle detection
- Proximity sensing
- Liquid level measurement
- Security systems
- Smart agriculture
- Parking assist systems
- Industrial automation
- Healthcare
- Educational projects
Technical Specifications
- Measures distances accurately using ultrasonic waves.
- Range: 2cm to 400cm.
- Operating Voltage: 5V DC.
- Response Time: Less than 50ms.
- Compact Size: Typically around 45mm x 20mm.
- Interface: Trigger and echo pins for connection to microcontrollers.
- Applications: Robotics, automation, obstacle detection.
- Affordable and widely used in electronic projects.
Pinout
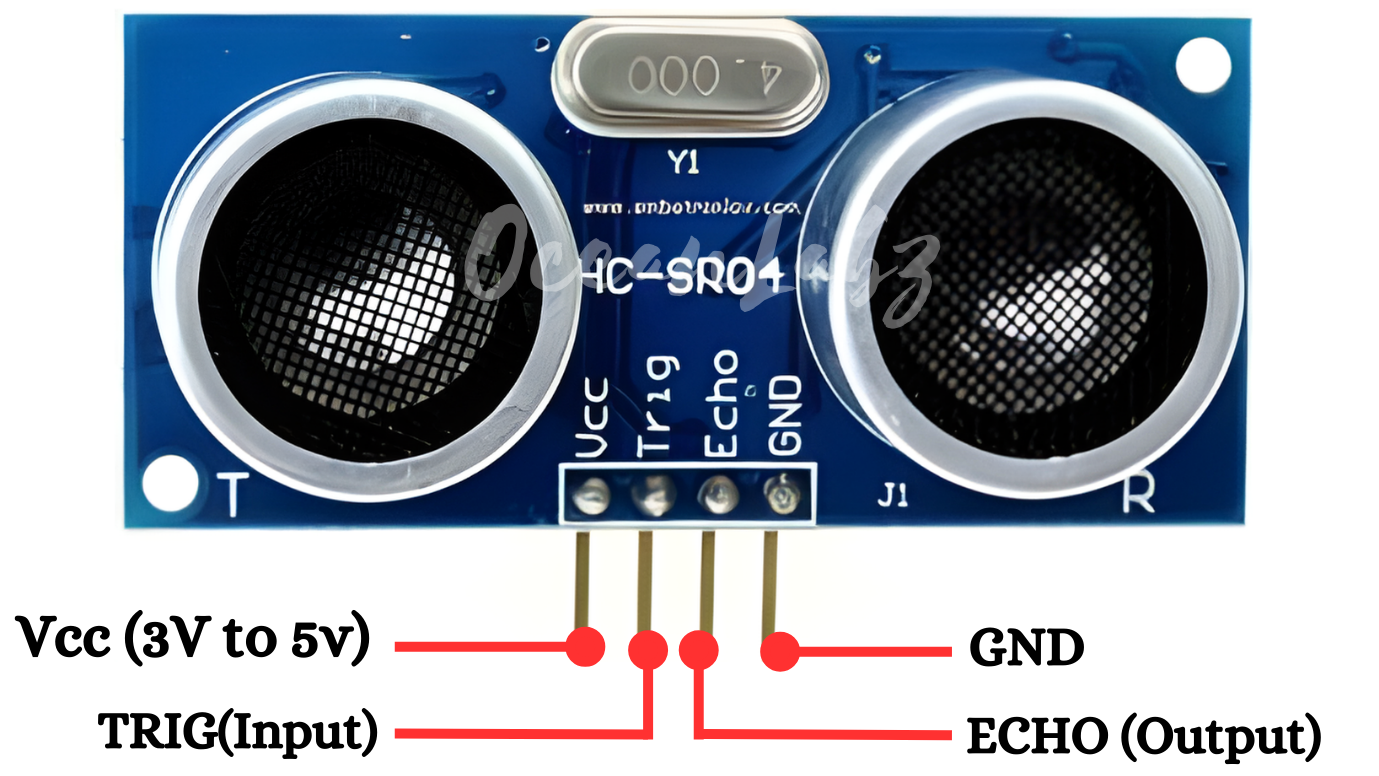
- VCC: Connect to Arduino 5V pin
- Trig: Connect to any digital pin (e.g., 8)
- Echo: Connect to any digital pin (e.g., 9)
- GND: Connect to Arduino GND pin
Circuit Diagram
| HC-SR04 Sonar pin | Arduino pin |
| VCC | 3~5 V |
| GND | GND |
| TRIG | D8 |
| ECHO | D9 |

Programming With Arduino
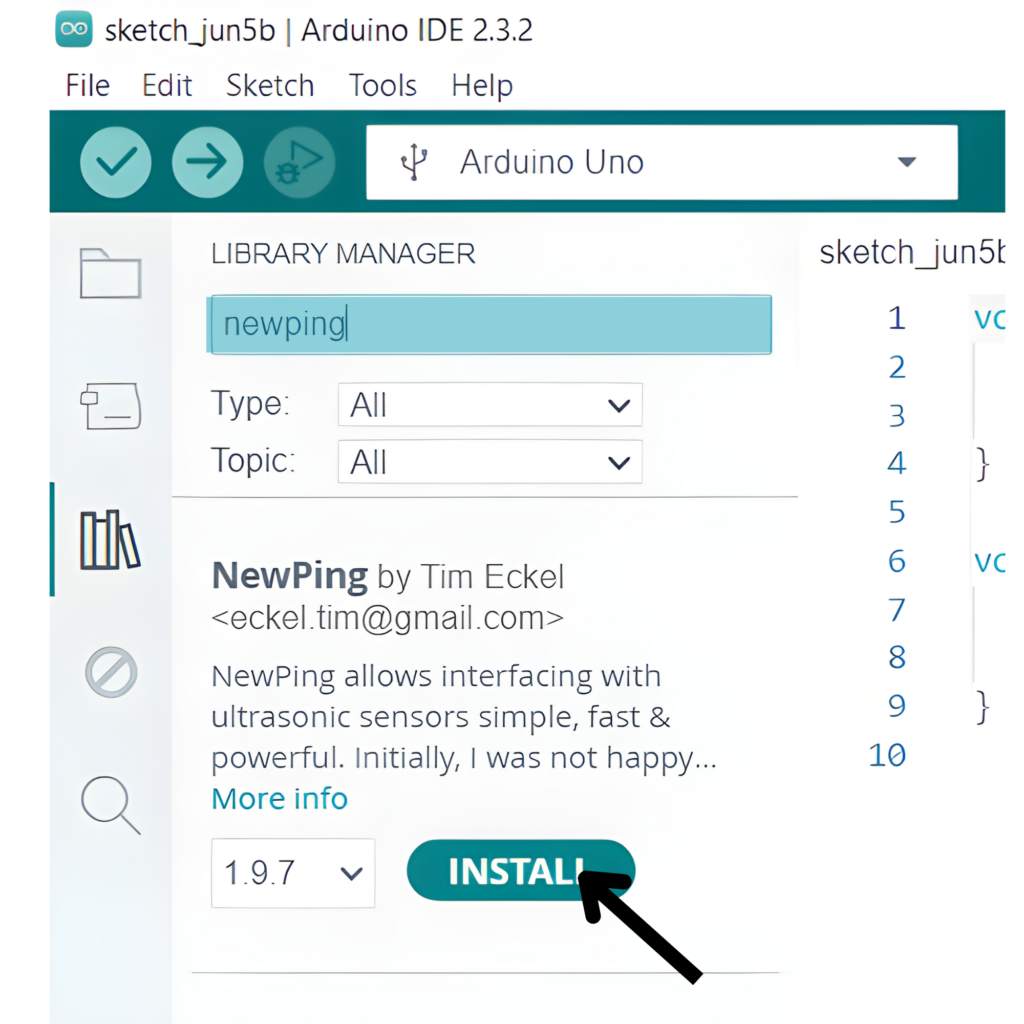
Step 1: Install NewPing Library:
- Go to Sketch > Include Library > Manage Libraries.
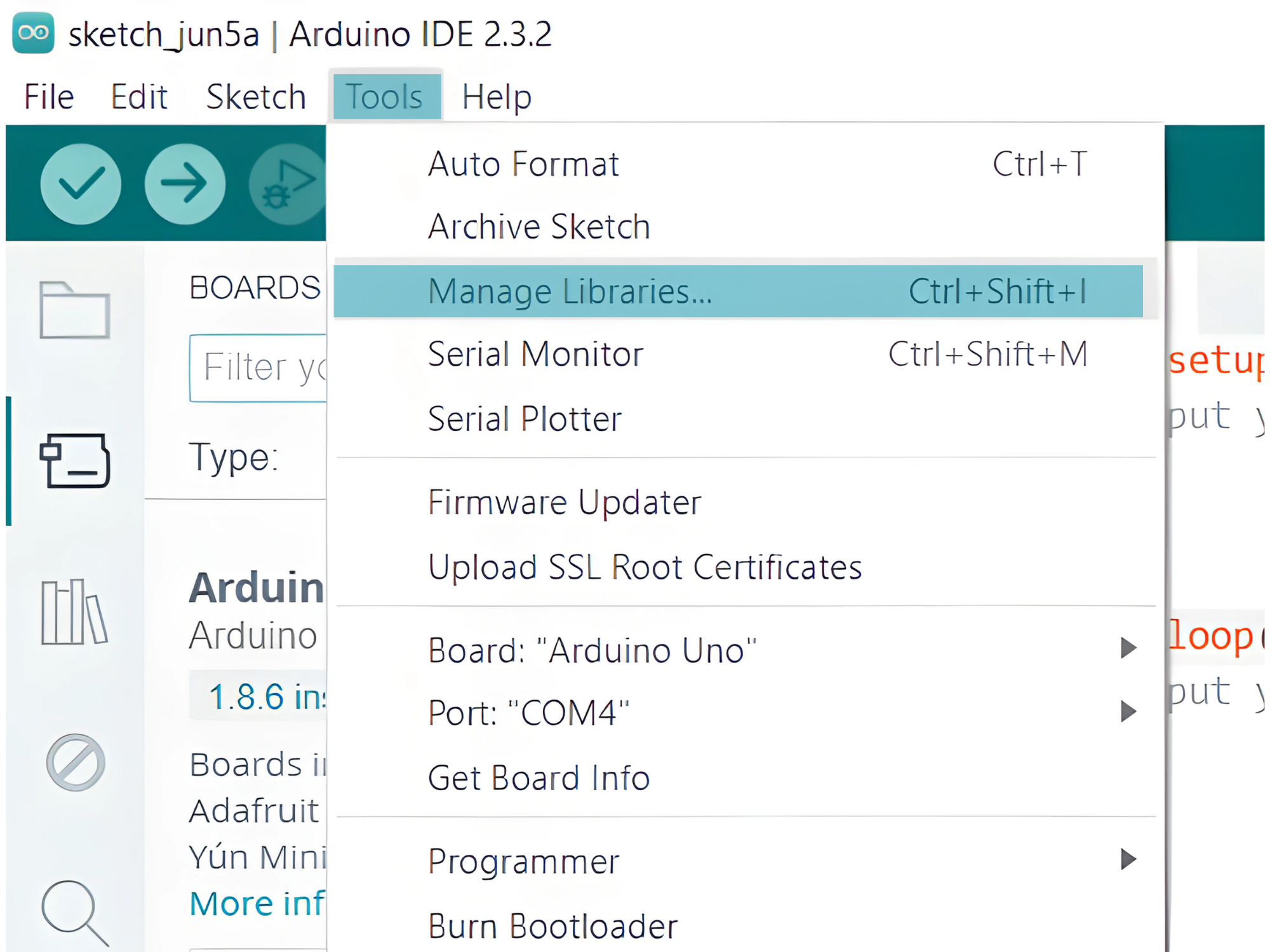
- In the Library Manager, search for “NewPing”.Click on the “NewPing” entry and click the “Install” button.
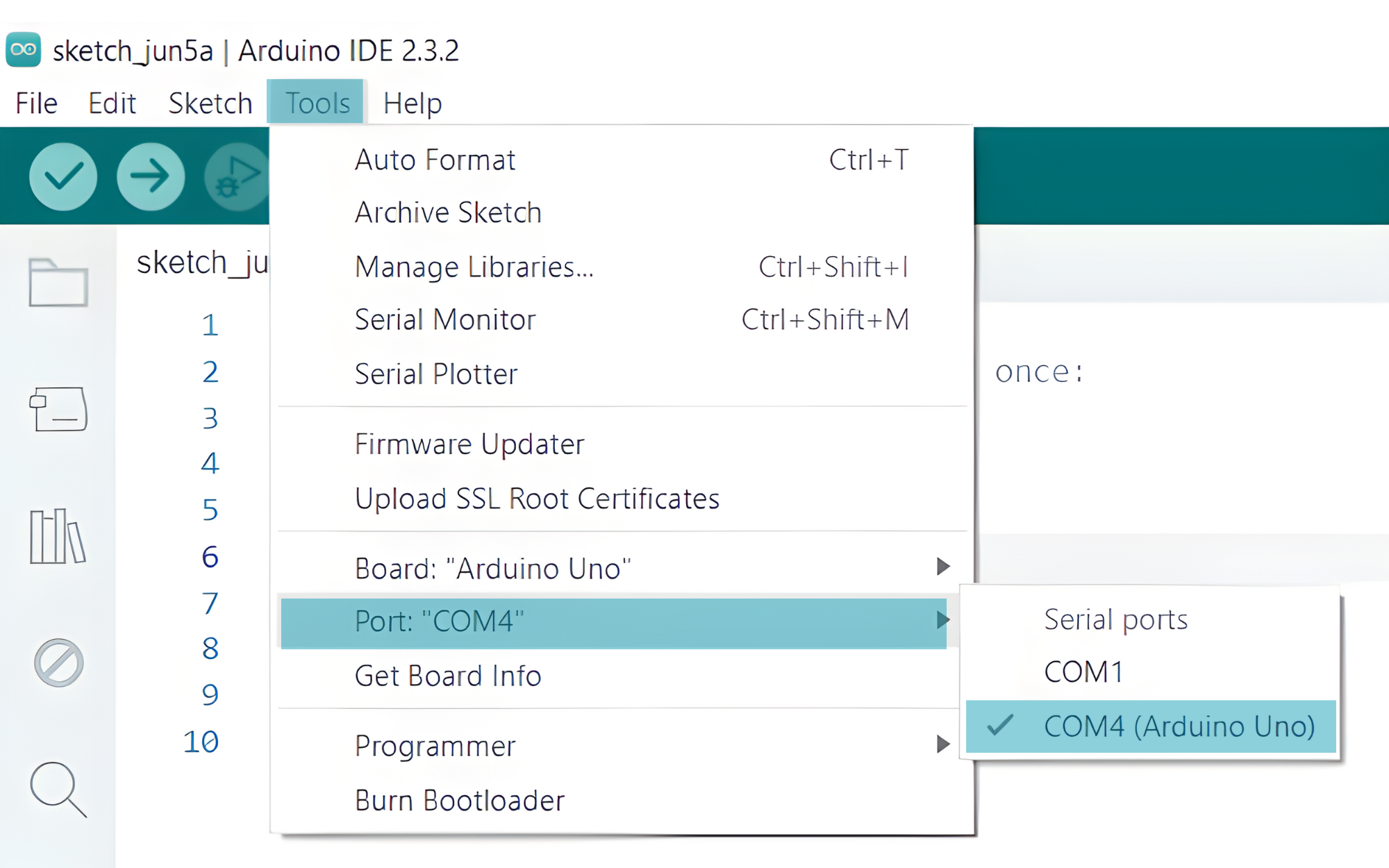
Step 2: Select your board type and port
- Go to Tools > Board and select your Arduino board (e.g., Arduino Uno).
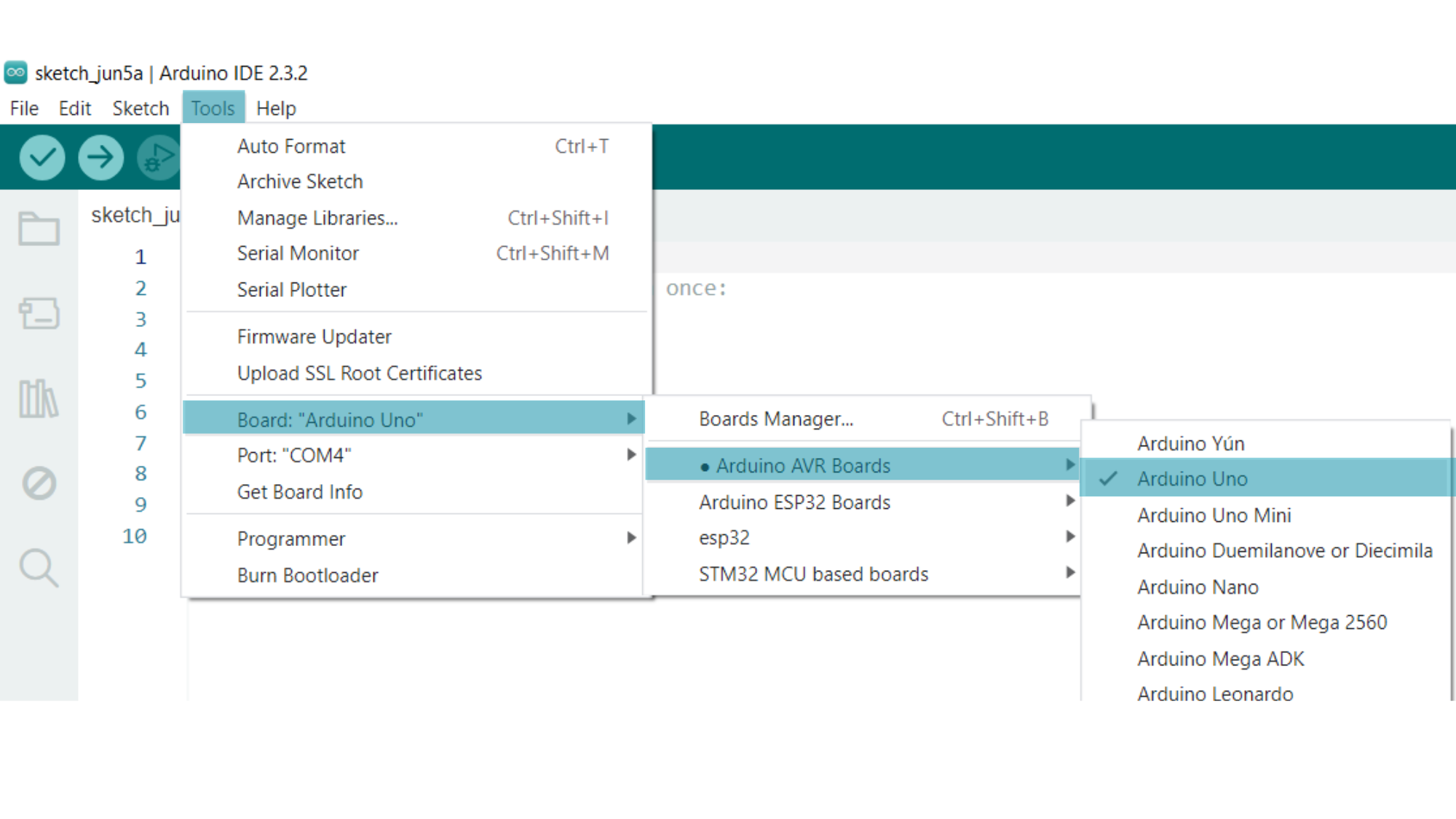
- Go to Tools > Port and select the port to which your Arduino is connected.
Step 3: Upload the Code:
- Copy the provided code into your Arduino IDE.
#include <NewPing.h>
#define TRIGGER_PIN 2
#define ECHO_PIN 3
#define MAX_DISTANCE 200
NewPing sonar(TRIGGER_PIN, ECHO_PIN, MAX_DISTANCE);
void setup() {
Serial.begin(9600);
}
void loop() {
delay(50);
unsigned int distance = sonar.ping_cm();
Serial.print("Distance: ");
Serial.print(distance);
Serial.println(" cm");
}
- Verify and upload the code to your Arduino board.

Step 4: Open Serial Monitor:
- Once the code is uploaded successfully, open the Serial Monitor in the Arduino IDE.
- Set the baud rate to 9600 baud.
- You should see distance measurements in centimeters printed in the Serial Monitor.
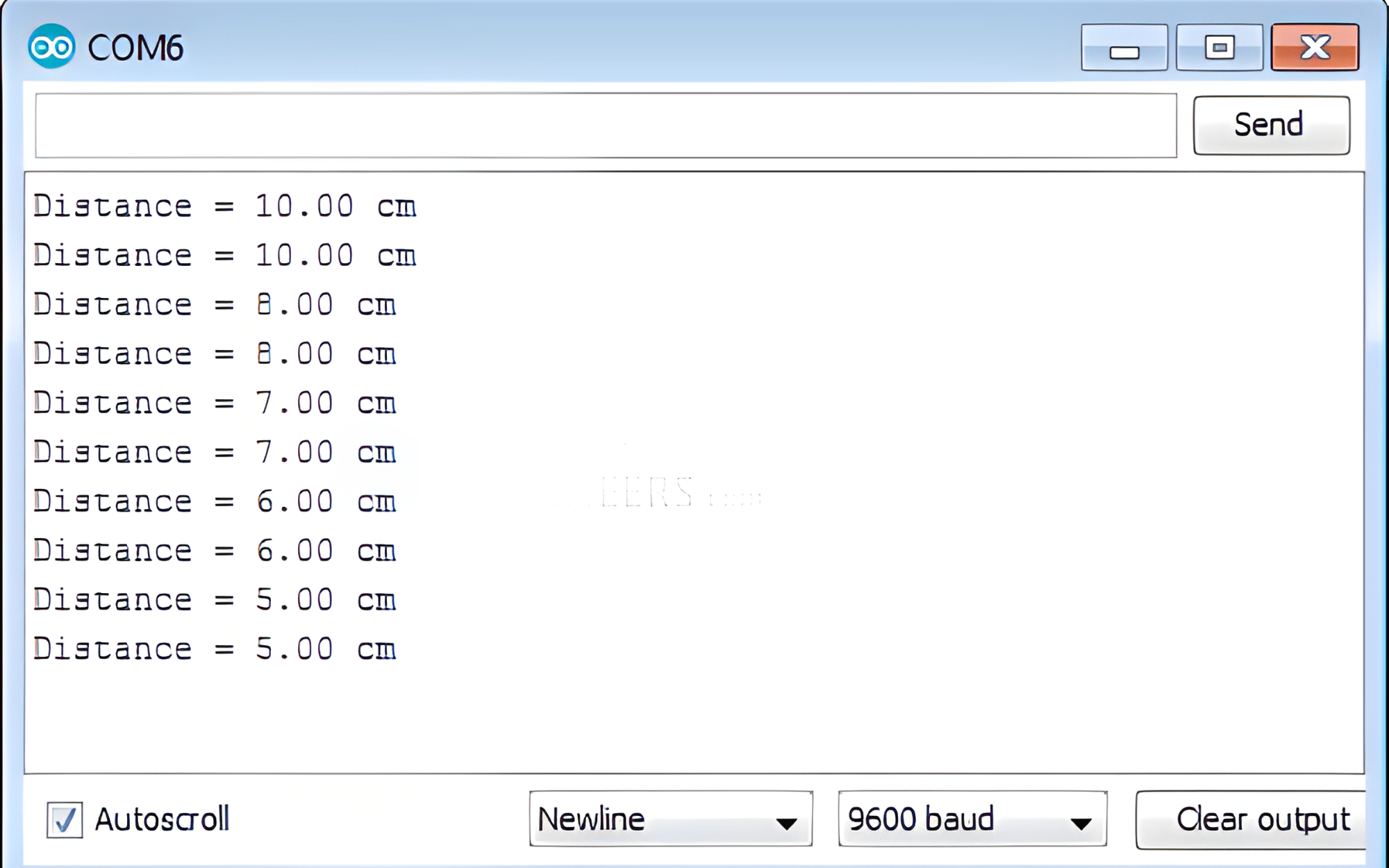
- Now, try placing objects in front of the ultrasonic sensor and observe the distance measurements displayed in the Serial Monitor.
- The sensor should accurately measure the distance from obstacles in front of it.


Comment (1)